International Journal of Mechanical Engineering and Mechatronics (IJMEM)
ISSN: 1929-2724

Volume 1, Issue 2 - Year 2013 - Pages 7-24
DOI: 10.11159/ijmem.2013.002
On-Off Tremor Suppression Orthosis with Electromagnetic Brake
Gil Herrnstadt, Carlo Menon
Simon Fraser University, School of Engineering Science
8888 University Dr., Burnaby, British Columbia, Canada
gherrnst@sfu.ca; cmenon@sfu.ca
Abstract - Pathological tremor is a common neurological movement disorder characterized by involuntary rhythmic oscillation of body parts. Available treatments are often insufficiently effective or are accompanied by severe side effects. This work proposes a lightweight, portable elbow tremor suppression orthosis using an electromagnetic brake (EB) with on-off actuation scheme. The device reduces tremor amplitude and could potentially be donned under clothes. At this stage of the project, the focus is on action tremor (postural) such as essential tremor. The elbow joint is commonly affected by tremor; it can be modelled as a single Degree Of Freedom (DOF) joint and was selected to test our hypothesis and prototype. The orthosis is actuated by an (EB). The algorithm alternates between full suppression and no suppression, and relies on the high frequency nature of tremor relative to the frequency of Activities of Daily Living (ADL). A MEMS gyro signal is processed to assess the tremor component. The system successfully reduces tremor amplitude with over 88% of tremor signal power reduction.
Keywords: Tremor suppression, exoskeleton robot, assistive technology, electromagnetic brake, high pass filter.
© Copyright 2013 Authors - This is an Open Access article published under the Creative Commons Attribution License terms. Unrestricted use, distribution, and reproduction in any medium are permitted, provided the original work is properly cited.
Date Received: 2013-09-20
Date Accepted: 2013-10-21
Date Published: 2013-11-20
1. Introduction
In broadest terms, tremor can be classified as either physiological or pathological. The former being normal and usually imperceptible to the naked eye while the latter is a serious disorder afflicting 3-4% of the population [1] causing disability and social exclusion.
Pathological tremor is witnessed in almost all body parts, such as legs, head and trunk [2], however it is most common in the upper limbs such as the shoulder, elbow and wrist [3]. The most prevalent and debilitating tremor disorders are Essential and Parkinsonian tremors [2, 4]. Other tremors include Dystonic and Cerebellar. Some causes for tremor are head injuries, multiple sclerosis, Friedreich's ataxia, Joseph's disease, some strokes and tumors, and chronic alcohol intoxication and metabolic poisoning [5]. The underlying mechanisms behind tremors are not fully understood. Common available treatments are medication, surgical and deep brain stimulation. Alternative treatments include physical therapy, relaxation techniques and assistive accessories. Despite these treatments, a large (40-50%) portion of patients do not find relief and sufficient improvement [6]. Because there is no definite cure, treatments are aimed at minimizing disability. Tremor disorders are often classified by their activation mode, i.e. rest, postural, action or task specific.
Research on tremor suppression devices is a relatively recent field. Several suppression systems have been suggested to date. In an early work, a dumped joystick was developed by an MIT group [7]. Aisen et al. [8] developed the Controlled-Energy-Dissipation Orthosis CEDO, a 3 Degree Of Freedom DOF wheel chair mounted device, permitting table top activities, that connects to the user's wrist and applies velocity proportional damping loads by means of magnetic particle brakes [8]. Some biomechanical loading ambulatory devices have been proposed. Kotovsky et al. developed a flexion and extension, wrist orthosis in which the actuator was a viscous beam that applied passive velocity proportional resistance [9]. An inherent disadvantage of this design is that viscous resistance is applied to all motions. A similar concept using magneto-rheological fluids and actively controlling the attenuation, was done by Loureiro et al., [10]. More recently a wearable orthosis for tremor assessment and suppression (WOTAS) of the upper limbs was suggested, with 3 DOF for the elbow and wrist flexion and extension [11]. A brushless DC motor with a harmonic gearbox is used for actuation in an active suppression method. Other types of orthotics have used functional electrical stimulation (FES) [12, 13, 14, 15]. An interesting study by Swollow et al. [16] proposes the use of ceramic based piezoelectric materials in a glove structure [16]. Work has also been done investigating conducting polymer actuators as well as magneto-rheological dampers [17, 18].
One of the common tasks in suppressing undesired motion superimposed on a desired one is that of separating the two motion components. Several approaches have been suggested in the literature. Rosen et al. have used pursuit tracking data in order to separate the desired and undesired components [5]. Rocon et al. have tested several algorithms to isolate the volitional motion component, and by subtracting this component from the total motion obtained the tremor component [4]. Using a filter to obtain the voluntary component resulted in a time lag; an adaptive algorithm, the Benedict–Bordner filter, was then chosen to estimate voluntary movement. A second algorithm, the weighted-frequency Fourier linear combiner (WFLC), was used to estimate the tremor signal parameters. Two approaches are then implemented using the tremor signal, a passive impedance force and an opposing velocity profile by the actuators. Ando et al. have used electromyography (EMG) signals to detect the voluntary movement using a low pass filter, Short-Time Fourier Transformation (STFT) and Neural Network (NN) to process the signal [24]. Another study by Widjaja et al. considered accelerometers and EMG sensor fusion for FES application using a Kalman Filter, and a low pass filter with a Bandwidth-Limited Fourier linear combiner (a variation on WFLC) algorithm for the tremor signal, [12].
A drawback with many of these systems is the bulkiness and electrical and mechanical power constraints. In this work we aim to demonstrate an alternative to previously suggested wearable tremor suppression systems.
2. System
The elbow orthosis is shown in Figure 1 and described in this section. The objective of the design was to test the feasibility of using a new type of actuator that can lead to a lightweight, portable exoskeleton. A micro Electromagnetic Brake (EB) was selected. It is able to generate relatively high torques (refer to Table 1) while keeping the system non-bulky and light. The main orthosis components were 3D printed; carbon fibre was utilized to strengthen a section of the upper arm component. Two gyros and a potentiometer (see Figure 1 (b-c)) were incorporated to measure angular velocity and position respectively.
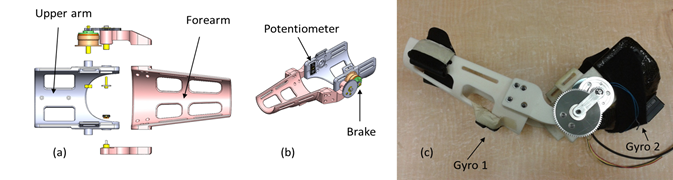
2. 1. Electromechanical Elbow Orthosis Description
The orthosis frame was 3D printed using an ABS material variant which is lightweight yet rigid. The type of brake used is an electromagnetic friction brake (EFB), (Chaintail MBG0S2AA). A magnetic field is generated when an excitation voltage is applied, which in turn draws the rotor plate against the stator friction surface. An EB possess several advantages when compared to DC motors; EBs generally have a higher torque and lower power consumption for a given weight/volume ratio. Control of an EB can be relatively simple with minimal circuitry required for actuation. Specifically for an EFB there are also several inherent disadvantages such as low repeatability and accuracy. These types of brakes generally perform best at the top portion of their torque range since their intended design is primarily for stopping rather than slipping applications.
Physical and electromechanical properties for the chosen brake are provided in Table 1. A 1:4 gear reduction system was implemented to increase the operational torque range. Expected elbow torque was estimated from literature sources of tremor and exoskeleton devices as well as data about healthy individuals [19, 20]. The device gross weight is 942 g.
The EFB static torque-voltage relation was obtained by performing a series of tests in which varying loads were applied. Voltages and torques were recorded to find the static torque. In practice torque is unstable towards the lower range and the rotor may not be drawn to the stator. Additional work may be required to characterize further this phenomenon.
Table 1. Electromagnetic brake properties.
|
Physical |
Electromechanical |
||||
|
Diameter |
Height |
Mass |
Torque |
Voltage |
Power |
|
43.6 mm |
25.4 mm |
~150 g |
2.2 Nm |
24 V |
8 W |
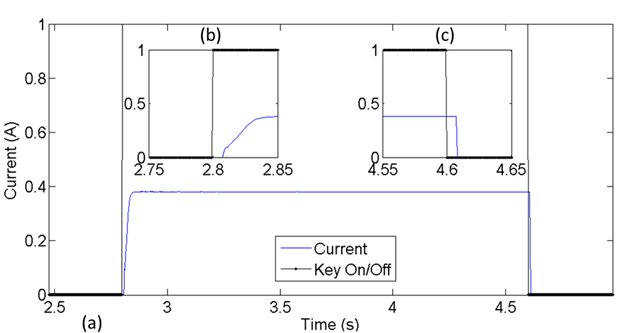
In order to conform to both right and left handed individuals, the device was designed with the main frame parts symmetric as shown in Figure 1. This reduced the number of parts, and consequently devices that needed to be fabricated. By simply removing the EFB, gears and potentiometer, and installing them on either side, the device fits on either arm. The rotor is part of the magnetic circuit, and the assembly distance of the brake rotor from the stator may also affect performance and response time; consequently we tested the current build-up as can be seen in Figure 2. The rise and fall time are less than 50 ms, taking into account hardware and software delays.
2. 2. Sensors, Circuitry and Software (Control Architecture)
Two MEMS gyros (Gyro Breakout Board - IDG500 Dual 500°/s) were installed on the forearm and upper arm of the orthosis. This allowed calculating the relative elbow joint velocity by subtraction of the signals. The selection of gyros was motivated by several considerations; they measure absolute angular velocity and are not affected by gravity. Gyros also have a high signal to noise ratio and a large dynamic range [11, 21]. The prices of MEMS sensors have declined in recent years leading to availability of small, lightweight and affordable sensors.
A single revolution potentiometer (Panasonic EVW-AE4001B14) was used to obtain joint angular data. The EFB was powered by a pack of AA batteries. NI LabVIEW 2010 and a Personal Computer (PC) were used for the control implementation. A Pulse Width Modulation (PWM) signal to a MOSFET switch allowed regulation of the excitation of the EFB.
3. Control Strategy and Performance
The control scheme developed was aimed at investigating and exploiting the functionality of an EB for tremor suppression while taking into consideration several limitations with the current prototype. These limitations include compliancy of the device frame, and limited repeatability and accuracy of the EFB.
A particular property of pathological tremor that is often relied on in the control design is the frequency property of the tremor motion component. It is well known that tremor tends to appear in the 3-12 Hz range [10, 22], while the frequency range of ADL is considered to fall below 2 Hz [23].
Our approach in this work was to demonstrate the tremor suppression performance for an on-off braking scheme. Namely, we sought to establish a minimal activation period for the brake as well as define the timing to initiate and stop the brake.
3. 1. Simplified Control Scheme
Because this type of actuator, to the authors' knowledge, has not been implemented in a similar application, we developed two methods to examine the feasibility. Initially, we tested braking with a threshold method. This essentially involved deriving the acceleration from the gyro information and activating the brake when the acceleration surpassed a threshold value. The rational for this idea is driven by the assumption that tremor movement exhibits higher accelerations than normal volitional movement. The results showed promise and the current algorithm was implemented which involves a 6th order elliptic High Pass Filter (HPF) with a 2 Hz cut-off and a lead phase response. The motivation for using an HPF is that we seek to extract the tremor movement component, which can be viewed as representing the activation command to the EFB. Since the actuator is inherently one that absorbs rather than emits energy, the voluntary signal component could not drive the actuation. An additional benefit is the lead phase shift of the specific filter model used, which contributes to a minimal delay of the actuation. On the other hand, implementing a LPF and subtracting from the total signal to obtain the tremor component could result in added delay.
Once the tremor signal was obtained, it was necessary to determine the timing and duration of the braking. This kind of approach would benefit from additional processing of the tremor signal to estimate its parameters in order to represent it more reliably, however perhaps less so than in continuous actuation approaches as mentioned in section 1. Another rational for this approach is that during the time that the brake is off, no resistance is applied to the movement. Part of our objective is to investigate the minimal period of time required to suppress the tremor. This approach is different than those suggested by other researchers. A potential disadvantage to this approach is a less smooth motion which may be less comfortable to users, however it is hypothesized that improving adaptability and accuracy of dampening forces, through actuator performance and more advanced algorithms, can help mitigate this issue.
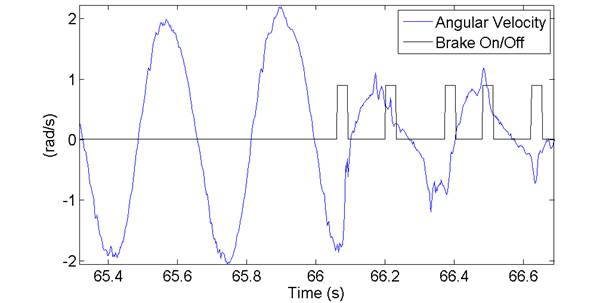
Recalling our on-off suppression approach and observing the oscillatory shape of the isolated tremor signal, we selected a point for applying the braking as shown inFigure 3. Considering a hypothetical case in which full suppression is achieved, the motion-based sensing methods used would become impracticable. That is an extreme scenario; to approach it we seek to initiate the suppression soon after the tremor motion begins. In practice this translates to activating the suppression soon after the angle crosses the tremor zero level (DC), or equivalently when the velocity reaches a peak. Velocity proportional braking was initially implemented. In order to achieve consistent performance and alleviate some of the actuator and assembly limitations, a fixed braking level was performed. It is important to note the brake timing is dependent on the signal phase shift, as dictated by the filter frequency response, which in turn is a function of the tremor frequency. The control scheme can adjust the brake timing based on the tremor frequency. The braking duration is set to 25 ms. It is possible that the current, and hence torque, may not reach full value within this activation time (see Figure 2b).
3. 2. Testing Protocol and Results
Ethics approval was obtained for the device from SFU office of research ethics. Three healthy volunteers were recruited to participate in the testing. The protocol consisted of donning the device and practicing elbow tremor motion with no active suppression for 30 s at both 3 and 4 Hz. Once the volunteer felt comfortable performing the arm movement at the desired frequency, they then practiced with the device in suppression mode (suppression on) for another 30 s at each frequency. Finally 2-3 repetitions of testing were performed. To assist the volunteers, a user interface displayed the tremor frequency while the movements were performed.
The angular velocity, position and Power Spectral Density (PSD) results for participant 3 and 2 are shown in Figure 4 and Figure 5 respectively.
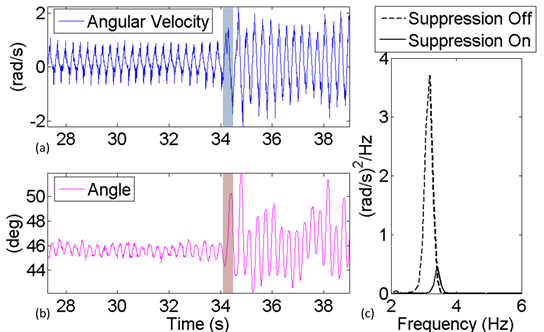
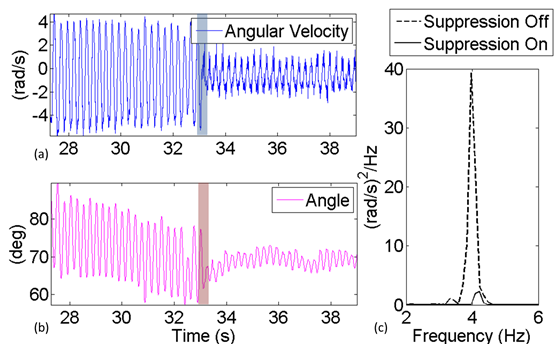
Testing at 3 Hz is shown in Figure 4. The suppression mode ends approximately at 34 seconds and is marked by a shaded line. A clear reduction in tremor amplitude for both angular velocity and angle can be observed. The PSD is computed separately, using an equal number of samples, for the suppressed and unsuppressed phases and also demonstrates attenuation of the signal. The ratio in power reduction for volunteer 3 between the suppressed and unsuppressed phases is 88%. Similarly, in Figure 5, testing at 4 Hz is performed. The suppression starts around the 33 second mark (marked by a shaded line). The volunteer tremor amplitude is reduced as can be seen in the velocity, angle and PSD signal. The power reduction for volunteer 2 is about 88%. Volunteer 2 in Figure 5 successfully performs volitional movement (about 5 deg) superimposed on the tremor movement. Since a goal of this project is to leave the voluntary movement component unaffected, this is a good indication of the system potential. It is also worth mentioning that testing on healthy subjects may induce artifacts. This aspect will need to be further tested with individuals having Essential Tremor.
4. Conclusion
Essential Tremor is a prevalent neurological disorder that can be highly debilitating. New and improved treatments are needed so that more afflicted individuals can find relief. This work demonstrates the feasibility of using an EB to suppress upper limb elbow tremor. A novel on/off suppression paradigm was proposed and tested on 3 healthy volunteers. The results showed promise in achieving a reduction of tremor using a new type of lightweight actuator able to generate high torques. Future work may be directed at improving the signal processing and timing algorithm as well as EFB actuator performance. The algorithm suggested here relies on the repetitive characteristics of tremor and in future work a more robust and adaptive method could be implemented to better model the tremor signal. Implementation on a real time system may allow improved performance as well through accurate timing and duration of the braking.
Acknowledgements
This work is supported by the Canadian Institutes of Health Research (CIHR), the Natural Sciences and Engineering Research Council of Canada (NSERC) and the International Essential Tremor Foundation.
References
[1] J. M. Belda-Lois, and Page Álvaro, "Biomechanical Constraints in the Design of Robotic Systems for Tremor Suppression." 2007, Retrieved August 26, 2012. View Article
[2] E. Rocon, and J. M. Belda-Loi. "Pathological tremor management: Modelling, compensatory technology and evaluation." Technology and Disability, 16: 3–18, 2004. View Article
[3] R. J. Elble, and G. Deuschl, "An update on essential tremor." Current Neurology and Neuroscience Reports, 9, 4, 273–7, 2009. 10.1007/s11910-009-0041-6 View Article
[4] E. Rocon, and J.L. Pons, "Exoskeletons in Rehabilitation Robotics", Springer Tracts in Advanced Robotics, 69, 150, Bruno Siciliano, Oussana Khatib, and Frans Groen. Springer Berlin Heidelberg, 2011. View Article
[5] M. J. Rosen, A. S. Arnold, I. J. Baiges, M. L. Aisen, and S. R. Eglowstein, "Design of a controlled-energy-dissipation orthosis (CEDO) for functional suppression of intention tremors." Journal of Rehabilitation Research and Development 32(1): 1–16, 1995. View Article
[6] M. Manto, M. Topping, M Soede, J. Sanchez-Lacuesta, W. Harwin, J. Pons, J. Williams, S. Skaarup, L. Normie "Dynamically responsive intervention for tremor suppression." IEEE Engineering in Medicine and Biology Magazine, 22, 3, 120-132, 2003. View Article
[7] J. Hendriks, M. Rosen, N. Berube, and M. Aisen, "A second-generation joystick for people disabled by tremor." In Kansas City, MO: RESNA Press, p. 248–251, 1991. View Article
[8] M. L. Aisen, A. Arnold, I. Baiges, S. Maxwell, and M. Rosen. 1993. "The effect of mechanical damping loads on disabling action tremor." Neurology, 43, 7, 1376, 1993. View Article
[9] J. Kotovsky, and M. J. Rosen, "A wearable tremor-suppression orthosis." Journal of Rehabilitation Research and Development 35, 4, 373–87, 1998. View Article
[10] R. C. V. Loureiro, and J. M. Belda-Lois. 2005. "Upper limb tremor suppression in ADL via an orthosis incorporating a controllable double viscous beam actuator", ICORR 2005, 9th International Conference on Rehability Robotics, 119-122, 2005. View Article
[11] E. Rocon, J. M. Belda-Lois, A. F. Ruiz, M. Manto, J. C. Moreno, and J. L. Pons. "Design and validation of a rehabilitation robotic exoskeleton for tremor assessment and suppression", IEEE Transactions on Neural Systems and Rehabilition Engineering, 15, 3, 367-378, 2007. View Article
[12] F. Widjaja, C. Y. Shee, D. Zhang, W. T. Ang, P. Poignet, A. Bo, D. Guiraud, "Current Progress on Pathological Tremor Modeling and Active Compensation using Functional Electrical Stimulation" ISG'08: The 6th Conference of the International Society for Gerontechnology, Pisa, Italy, 2008. View Article
[13] L. P. Manesky, N. Jorgovanovic, V. Ilic, S. Dosen, T. Keller, M. B. Popovic, D. B. Popovic, "Electrical stimulation for the suppression of pathological tremor." Medical & Biological Engineering and Computing, 49, 10, 1187-1193, 2011. View Article
[14] J.A. Gallego, E. Rocon, J. Ibañez , J. L Dideriksen, A. D. Koutsou, R. Paradiso, M. B. Popovic, J. M. Belda-Lois, F. Gianfelici, D. Farina, D. B. Popovic, M. Manto, T. D'Alessio, J. L. Pons, "A soft wearable robot for tremor assessment and suppression." 2011 IEEE International Conference on Robotics and Automation (ICRA), 2249-2254, 2011. View Article
[15] D. Zhang, and W. T. Ang "Reciprocal EMG controlled FES for pathological tremor suppression of forearm." 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 481-4813, 2007. View Article
[16] L. Swallow, and E. Siores, "Tremor Suppression Using Smart Textile Fibre Systems." Journal of Fiber Bioengineering and Informatics 1, 4, 261–266, 2009. View Article
[17] S. Skaarup, L. Bay, K. West, "Polypyrrole actuators working at 2–30Hz." Synthetic Metals 157, 323–326. View Article
[18] D. Case, B. Taheri, E. Richer, "Design and Characterization of a Small-Scale Magnetorheological Damper for Tremor Suppression." IEEE/ASME Transactions on Mechatronics 18, 1 96–103, 2013. View Article
[19] N. G. Tsagarakis and D. G. Caldwell, "Development and Control of a ' Soft-Actuated ' Exoskeleton for Use in Physiotherapy and Training", Autonomous Robots, 15, 1, 21-33, 2003. View Article
[20] Gupta, M. K. O'Malley, "Design of a Haptic Arm Exoskeleton for Training and Rehabilitation", IEEE/ASME Transactions on Mechatronics, 11, 3, 2006. View Article
[21] J. A. Gallego, E. Rocon, J. O. Roa, J. C. Moreno, J. L. Pons, "Real-time estimation of pathological tremor parameters from gyroscope data" Sensors, 10, 3, 2129-2149, 2010. View Article
[22] D. A. Heldman, J. Jankovic, D. E. Vaillancourt, J. Prodoehl, R. J. Rlble, J. P. Giuffrida, "Essential tremor quantification during activities of daily living." Parkinsonism & Related Disorders, 17, 7, 537-542, 2011. View Article
[23] J. A. Gallego, E. Rocon, J. O. Roa, J. C. Moreno, A. D. Koutsou, J. L. Pons, "On the use of inertial measurement units for real-time quantification of pathological tremor amplitude and frequency", Procedia Chemisty, Proceedings of the Eurosensors XXIII conference, 1, 1, 1219-1222, 2009. View Article
[24] T. Ando, M. Watanabe, K. Nishimoto, Y. Matsumoto, M. Seki, M. G. Fujie, "Myoelectric-Controlled Exoskeletal Elbow Robot to Suppress Essential Tremor: Extraction of Elbow Flexion Movement Using STFTs and TDNN." Journal of Robotics and Mechatronics, 24, 1, 141-149, 2012. View Article